Spirit rover
 Artist's Concept of Rover on Mars |
|
| Operator | NASA |
|---|---|
| Mission type | Rover |
| Orbital insertion date | Landed on January 4, 2004 |
| Launch date | June 10, 2003[1] |
| Launch vehicle | Delta II 7925 9.5 rocket[1][2] |
| Mission duration | Planned: 90 Martian solar days (~92 Earth days) Current: 2598 Earth days since landing (1944 Earth days of mobility from landing to final embedding) |
| COSPAR ID | 2003-027A |
| Homepage | JPL's Mars Exploration Rover home page |
| Mass | 185 kg (408 lb) |
| Power | Solar panels |
| Batteries | Rechargeable lithium ion batteries |

Spirit, mission designation MER-A (Mars Exploration Rover - A), is the first of the two rovers of NASA's ongoing Mars Exploration Rover Mission. It landed successfully on Mars at 04:35 Ground UTC on January 4, 2004, three weeks before its twin, Opportunity (MER-B), landed on the other side of the planet. Its name was chosen through a NASA-sponsored student essay competition.
The rover completed its planned 90-sol mission. Aided by cleaning events that resulted in higher power from its solar panels, Spirit went on to function effectively over twenty times longer than NASA planners expected following mission completion. Spirit also logged about 10 kilometers of driving instead of the planned 1 km, allowing more extensive geological analysis of Martian rocks and planetary surface features. Initial scientific results from the first phase of the mission (the 90-sol prime mission) were published in a special issue of the journal Science.[3]
On May 1, 2009 (5 years, 3 months, 27 Earth days after landing; 21.6 times the planned mission duration), Spirit became stuck in soft soil.[4] This was not the first of the mission's "embedding events" and for the following eight months NASA carefully analyzed the situation, running Earth-based theoretical and practical simulations, and finally programming the rover to make extrication drives in an attempt to free itself. These efforts continued until January 26, 2010 (6 years and 22 days after landing; 24.6 times the planned mission duration), when NASA officials announced that the rover was likely irrecoverably obstructed by its location in soft soil,[5] though it will continue to perform scientific research from its current location.[6]
As of July 2010[update], the rover team continues to listen for communication from the lander. No communication has been received from the rover since Sol 2210 (March 22, 2010).[7]
The Jet Propulsion Laboratory (JPL), a division of the California Institute of Technology in Pasadena, manages the Mars Exploration Rover project for NASA's Office of Space Science, Washington.
Objectives

The scientific objectives of the Mars Exploration Rover mission are to:[8]
- Search for and characterize a variety of rocks and soils that hold clues to past water activity. In particular, samples sought will include those that have minerals deposited by water-related processes such as precipitation, evaporation, sedimentary cementation or hydrothermal activity.
- Determine the distribution and composition of minerals, rocks, and soils surrounding the landing sites.
- Determine what geologic processes have shaped the local terrain and influenced the chemistry. Such processes could include water or wind erosion, sedimentation, hydrothermal mechanisms, volcanism, and cratering.
- Perform calibration and validation of surface observations made by Mars Reconnaissance Orbiter instruments. This will help determine the accuracy and effectiveness of various instruments that survey Martian geology from orbit.
- Search for iron-containing minerals, identify and quantify relative amounts of specific mineral types that contain water or were formed in water, such as iron-bearing carbonates.
- Characterize the mineralogy and textures of rocks and soils and determine the processes that created them.
- Search for geological clues to the environmental conditions that existed when liquid water was present.
- Assess whether those environments were conducive to life.
During the next two decades, NASA will continue to conduct missions to address whether life ever arose on Mars. The search begins with determining whether the Martian environment was ever suitable for life. Life, as we understand it, requires water, so the history of water on Mars is critical to finding out if the Martian environment was ever conducive to life. Although the Mars Exploration Rovers do not have the ability to detect life directly, they are offering very important information on the habitability of the environment during the planet's history.
Design and construction


Spirit (and its twin, Opportunity) are six-wheeled, solar-powered robots standing 1.5 m (4.9 ft) high, 2.3 m (7.5 ft) wide and 1.6 m (5.2 ft) long and weighing 180 kg (400 lb). Six wheels on a rocker-bogie system enable mobility over rough terrain. Each wheel has its own motor. The vehicle is steered at front and rear and is designed to operate safely at tilts of up to 30 degrees. Maximum speed is 50 mm/s (2 in/s); 1.8 km/h, although average speed is about 10 mm/s (0.4 in/s). Both Spirit and Opportunity have pieces of the fallen World Trade Center's metal on them which were "turned into shields to protect cables on the drilling mechanisms".[9][10]
Solar arrays generate about 140 watts for up to four hours per Martian day (sol) while rechargeable lithium ion batteries store energy for use at night. Spirit's onboard computer uses a 20 MHz RAD6000 CPU with 128 MB of DRAM, 3 MB of EEPROM, and 256 MB of flash memory. The rover's operating temperature ranges from −40 °C to +40 °C (−40 °F to 104 °F) and Radioisotope heater units provide a base level of heating, assisted by electrical heaters when necessary. A gold film and a layer of silica aerogel provide insulation.
Communications depends on an omnidirectional low-gain antenna communicating at a low data rate and a steerable high-gain antenna, both in direct contact with Earth. A low gain antenna is also used to relay data to spacecraft orbiting Mars.
Fixed science instruments include
- Panoramic Camera (Pancam) - examines the texture, color, mineralogy, and structure of the local terrain.
- Navigation Camera (Navcam) - monochrome with a higher field of view but lower resolution, for navigation and driving.
- Miniature Thermal Emission Spectrometer (Mini-TES) - identifies promising rocks and soils for closer examination, and determines the processes that formed them.
The rover arm holds the following instruments
- Mössbauer spectrometer (MB) MIMOS II - used for close-up investigations of the mineralogy of iron-bearing rocks and soils.
- Alpha particle X-ray spectrometer (APXS) - close-up analysis of the abundances of elements that make up rocks and soils.
- Magnets - for collecting magnetic dust particles.
- Microscopic Imager (MI) - obtains close-up, high-resolution images of rocks and soils.
- Rock Abrasion Tool (RAT) - exposes fresh material for examination by instruments on-board.
The cameras produce 1024-pixel by 1024-pixel images, the data is compressed, stored, and transmitted later.
Mission overview

The primary surface mission for Spirit was planned to last at least 90 sols. The mission has received several extensions and as of 8 April 2009[update] had passed 1,800 sols. On August 11, 2007, Spirit obtained the second longest operational duration on the surface of Mars for a lander or rover at 1282 Sols, one Sol longer than the Viking 2 lander. Viking 2 was powered by a nuclear cell whereas Spirit is powered by solar arrays. Currently the Mars probe with longest operational period is Viking 1 which lasted for 2245 Sols on the surface of Mars. Should Spirit still be operational on April 29, 2010, at 2246 Sols it would surpass Viking 1 as having longest operational duration on the surface of Mars for a lander or rover. However, due to a low power fault, it is unclear if the rover is still operational. An archive of weekly updates on the rover's status can be found at the Spirit Update Archive.[12]
Spirit's total odometry as of February 1, 2010 (sol 2165) is 7,730.48 meters (4.80 mi).[13]
2004
The Spirit Mars rover and lander arrived successfully on the surface of Mars on 04:35 Ground UTC on January 4, 2004. This was the start of its 90-sol mission, but solar cell cleaning events would mean it was the start of a much longer mission, lasting at least until 2010.
Landing site: Columbia Memorial Station
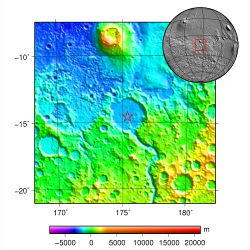
Spirit was targeted to a site that appears to have been affected by liquid water in the past, the crater Gusev, a possible former lake in a giant impact crater about 10 km from the center of the target ellipse[14] at .[15]
After the airbag-protected landing craft settled onto the surface, the rover rolled out to take panoramic images. These give scientists the information they need to select promising geological targets and drive to those locations to perform on-site scientific investigations.
The panoramic image below shows a slightly rolling surface, littered with small rocks, with hills on the horizon up to 27 km away.[16] The MER team named the landing site "Columbia Memorial Station," in honor of the seven astronauts killed in the Space Shuttle Columbia disaster.

Sleepy Hollow
"Sleepy Hollow," a shallow depression in the Mars ground at the right side of the above picture, was targeted as an early destination when the rover drove off its lander platform. NASA scientists were very interested in this crater. It is 9 meters (30 feet) across and about 12 meters (40 feet) north of the lander.
"Just as the ancient mariners used sextants for 'shooting the Sun,' as they called it, we were successfully able to shoot the Sun with our panorama camera, then use that information to point the antenna," said JPL's Matt Wallace, mission manager.
First color image

To the left is the first color image derived from images taken by the panoramic camera on the Mars Exploration Rover Spirit. It was the highest resolution image taken on the surface of another planet. "We're seeing a panoramic mosaic of four pancam images high by three wide," said camera designer Jim Bell of Cornell University. The picture shown originally had a full size of 4,000 by 3,000 pixels. However, a complete pancam panorama is even 8 times larger than that, and could be taken in stereo (i.e., two complete pictures, making the resolution twice as large again.) The colors are fairly accurate. (For a technical explanation, see colors outside the range of the human eye.)
The MER pancams are black-and-white instruments. Thirteen rotating filter wheels produce multiple images of the same scene at different wavelengths. Once received on earth, these images can be combined to produce color images.[17]
Sol 18 (January 21, 2004) flash memory management anomaly

On January 21, 2004 (Sol 18), Spirit abruptly ceased communicating with mission control. The next day the rover radioed a 7.8 bit/s beep, confirming that it had received a transmission from Earth but indicating that the craft believed it was in a fault mode. Commands would only be responded to intermittently. This was described as a very serious anomaly, but potentially recoverable if it were a software or memory corruption issue rather than a serious hardware failure. Spirit was commanded to transmit engineering data, and on January 23 sent several short low-bitrate messages before finally transmitting 73 megabits via X band to Mars Odyssey. The readings from the engineering data suggested that the rover was not staying in sleep mode. As such, it was wasting its battery power and overheating — risk factors that could potentially destroy the rover if not fixed soon. On Sol 20, the command team sent it the command SHUTDWN_DMT_TIL ("Shutdown Dammit Until <time>") to try to cause it to suspend itself until a given time. It seemingly ignored the command.
The leading theory at the time was that the rover was stuck in a "reboot loop". The rover was programmed to reboot if there was a fault aboard. However, if there was a fault that occurred during reboot, it would continue to reboot forever. The fact that the problem persisted through reboot suggested that the error was not in RAM, but in either the flash memory, the EEPROM, or a hardware fault. The last case would likely doom the rover. Anticipating the potential for errors in the flash memory and EEPROM, the designers had made it so that the rover could be booted without ever touching the flash memory. The radio itself could decode a limited command set — enough to tell the rover to reboot without using flash. Without access to flash memory, Spirit booted fine, and the reboot cycle was broken.
On January 24 the rover repair team announced that the problem was with Spirit's flash memory and the software that wrote to it. The flash hardware was believed to be working correctly but the file management module in the software was "not robust enough" for the operations the Spirit was engaged in when the problem occurred, indicating that the problem was caused by a software bug as opposed to faulty hardware. NASA engineers finally came to the conclusion that there were too many files on the file system, which was a relatively minor problem. Most of these files contained unneeded in-flight data. After realizing what the problem was, the engineers deleted some files, and eventually reformatted the entire flash memory system. On February 6 (Sol 33), the rover was restored to its original working condition, and science activities resumed.[18]
History's first intentional grinding of a rock on Mars

The round, shallow depression in this image resulted from the first intentional grinding of a rock on Mars in history. The Rock Abrasion Tool (aka "RAT") on NASA's Spirit rover ground off the surface of a patch 45.5 millimeters (1.895 inches) in diameter on a rock called Adirondack during Spirit's 34th sol on Mars, February 6, 2004. The hole is 2.65 millimeters (0.1 inch) deep, exposing fresh interior material of the rock for close inspection with the rover's microscopic imager and two spectrometers on the robotic arm. This image was taken by Spirit's panoramic camera, providing a quick visual check of the success of the grinding.
"The RAT performed beyond our expectations," beamed Steve Gorevan, of Honeybee Robotics, New York, lead scientist for the rock abrasion tools on both rovers. "With the docile cutting parameters we set, I didn't think that it would cut this deep. In fact, when we saw virtually a complete circle, I was thrilled beyond anything I could have ever dreamed. Following up that glorious circular brushing — it's like back-to-back homers."
Mimi rock (Sol 40)

This color image taken by the Mars Exploration Rover Spirit's panoramic camera on Sol 40 (February 13, 2004) is centered on an unusually flaky rock called Mimi. Mimi is only one of many features in the area known as "Stone Council", but looks very different from any rock that scientists have seen at the Gusev crater site so far. Mimi's flaky appearance leads scientists to a number of hypotheses. Mimi could have been subjected to pressure either through burial or impact, or may have once been a dune that was cemented into flaky layers, a process that sometimes involves the action of water.
Humphrey and clues for water
On March 5, 2004, NASA announced that Spirit had found hints of water history on Mars in a rock dubbed "Humphrey". Dr. Raymond Arvidson, Ph.D., the McDonnell University Professor and chair of Earth and planetary sciences at Washington University in St. Louis, reported during a NASA press conference: "If we found this rock on Earth, we would say it is a volcanic rock that had a little fluid moving through it." In contrast to the rocks found by the twin rover Opportunity, this one was formed from magma and then acquired bright material in small crevices, which look like crystallized minerals. If this interpretation holds true, the minerals were most likely dissolved in water, which was either carried inside the rock or interacted with it at a later stage, after it formed.[19]
Bonneville Crater
On March 11, 2004, the Spirit rover reached Bonneville crater after a 400-yard (370 m) journey. This crater is about 200 meters (220 yd) across with a floor about 10 metres (11 yd) below the surface.[20] JPL decided that it would be a bad idea to send the rover down into the crater, as they saw no targets of interest inside. Spirit drove along the southern rim and continued to the southwest towards the Columbia Hills.

Looking back at the lander.
|
Bonneville Crater.
|
Missoula and Lahontan Craters, en route to Columbia Hills

Spirit reached Missoula crater on Sol 105. The crater is roughly 100 yards (91 m) across and 20 yards (18 m) deep. Missoula crater was not considered a high priority target due to the older rocks it contained. The rover skirted the northern rim, and continued to the southeast.

It then reached Lahontan crater on Sol 118, and drove along the rim until Sol 120. Lahontan is about 60 yards (55 m) across and about 10 yards (9.1 m) deep. A long, snaking sand dune stretches away from its southwestern side, and Spirit went around it, because loose sand dunes present an unknown risk to the ability of the rover wheels to get traction.
Columbia Hills
On Sol 159, Spirit reached the first of many targets at the base of the Columbia Hills called West Spur. Hank's Hollow was studied for 23 sols. Within Hank's Hollow was the strange looking rock dubbed "Pot of Gold".
From here, Spirit took a northerly path along the base of the hill towards the target Wooly Patch, which was studied from Sol 192 to Sol 199. By Sol 203, Spirit had driven southward up the hill and arrived at the rock dubbed "Clovis". Clovis was ground and analyzed from Sol 210 to Sol 225. Following Clovis came the targets of Ebenezer (Sols 226-235), Tetl (Sol 270), Uchben and Palinque (Sols 281-295), and Lutefisk (Sols 296-303). From Sols 239 to 262, Spirit powered down for solar conjunction, when communications with the Earth are blocked.
Slowly, Spirit has made its way around the summit of Husband Hill, and at Sol 344 was ready to climb over the newly designated "Cumberland Ridge" and into "Larry's Lookout" and "Tennessee Valley".
2005-2006
On Sol 371, Spirit arrived at a rock named "Peace" near the top of Cumberland Ridge. Spirit ground it with the RAT on Sol 373.
By Sol 390 (Mid-February 2005), Spirit was advancing towards "Larry's Lookout", by driving up the hill in reverse. The scientists at this time were trying to conserve as much energy as possible for the climb.
Spirit also investigated some targets along the way, including the soil target, "Paso Robles", which contained the highest amount of salt found on the red planet. The soil also contained a high amount of phosphorus in its composition, however not nearly as high as another rock sampled by Spirit, "Wishstone". Squyres said of the discovery, "We're still trying to work out what this means, but clearly, with this much salt around, water had a hand here".
 Pot of Gold rock |
 Spirit's traverse up Husband Hill |
 Spirit artificially added to image (taken by itself) of Larry's Lookout |
 Photograph of a Martian sunset taken by Spirit at Gusev crater, May 19, 2005. |
Dust devils

On March 9, 2005 (probably during the Martian night), the rover's solar panel efficiency jumped from around 60% of what it had originally been to 93%, followed on 10 March by the sighting of dust devils. NASA scientists speculate a dust devil must have swept the solar panels clean, possibly significantly extending the duration of the mission. This also marks the first time dust devils had been spotted by either Spirit or Opportunity, easily one of the top highlights of the mission to date. Dust devils had previously been photographed by only the Pathfinder probe.
Mission members monitoring the Spirit rover on Mars reported on March 12, 2005, that a lucky encounter with a dust devil had cleaned the solar panels of that robot. Power levels dramatically increased and daily science work was anticipated to be expanded.[21]
Husband Hill summit
On Sol 582, August 21, 2005, Spirit reached the summit of Husband Hill and acquired a 360 degree panorama picture.

View from the Summit taken by Spirit on August 23, 2005 as the rover completed climb up "Husband Hill."
|

Vista while descending Husband Hill
|
Home Plate (Sol 744)
Spirit arrived at the north west corner of Home Plate, a raised and layered outcrop on sol 744 after an effort to maximize driving. Scientific observations have been conducted with Spirit's robotic arm.

Curious rock near edge of "Home Plate" with a jutting portion. (Animated GIF image for stereoscopic perception. Click to see animation).
|

Picture of Spirit, including tracks, taken from the Mars Reconnaissance Orbiter
|
During 2007 Spirit spent several months near the base of the Home Plate plateau. On sol 1306 Spirit climbed onto the eastern edge of the plateau. In September and October it examined rocks and soils at several locations on the southern half of the plateau. On November 6, Spirit had reached the western edge of Home Plate, and started taking pictures for a panoramic overview of the western valley, with Grissom Hill and Husband Hill visible. The panorama image was published on NASA's website on January 3, 2008 to little attention, until January 23, when an independent website[22] (Image w/ closeup) published a magnified detail of the left side of the original image in which is visible what looks much like a dark green humanoid sitting on a rock or walking down a hill with the right arm raised.[23] This strange formation is also visible when viewing the image in full resolution on the NASA website. The presence of the feature in all separate images which were combined to make the color image as well as NavCam images from several days earlier, conclusively show that it is a permanent feature.
McCool Hill
Spirit's next stop was originally planned to be the north face of McCool Hill, where Spirit would receive adequate sunlight during the Martian winter. On March 16, 2006 JPL announced that Spirit's troublesome front wheel had stopped working altogether. Despite this, Spirit was still making progress toward McCool Hill because the control team programmed the rover to drive toward McCool Hill backwards, dragging its broken wheel.[24] In late March, Spirit encountered loose soil which was impeding its progress toward McCool Hill. A decision was made to terminate attempts to reach McCool Hill and instead park on a nearby ridge named Low Ridge Haven.
Low Ridge Haven

Reaching the ridge on April 9, 2006 and parking on the ridge with an 11° incline to the north, Spirit spent the next eight months on the ridge during which time undertaking observations of changes in the surrounding area.[25] No drives were attempted because of the low power levels the rover was experiencing during the Martian winter. The rover made its first drive, a short turn to position targets of interest within reach of the robotic arm, in early November 2006, following the shortest days of winter and solar conjunction when communications with Earth were severely limited.
While at Low Ridge, Spirit imaged two rocks of similar chemical nature to that of Opportunity's Heat Shield Rock, a meteorite on the surface of Mars. Named "Zhong Shan" for Sun Yat-sen and "Allan Hills" for the location in Antarctica where several Martian meteorites have been found, they stood out against the background rocks which were darker. Further spectrographic testing is being done to determine the exact composition of these rocks, which may turn out to also be meteorites.
2007-2008
Software upgrade
On January 4, 2007, both rovers received new flight software to the onboard computers. The update was received just in time for the third anniversary of their landing. The new systems let the rovers decide whether or not to transmit an image, and whether or not to extend their arms to examine rocks, which would save much time for scientists as they would not have to sift through hundreds of images to find the one they want, or examine the surroundings to decide to extend the arms and examine the rocks.[26]
Microbe clue
Spirit's dead wheel turned out to be a mixed blessing. As it was traveling in December 2007, pulling the dead wheel behind, the wheel scraped off the upper layer of the Martian soil, uncovering a patch of ground that scientists say shows evidence of a past environment that would have been perfect for microbial life. It is similar to areas on Earth where water or steam from hot springs came into contact with volcanic rocks. On Earth, these are locations that tend to teem with bacteria, said rover chief scientist Steve Squyres. "We're really excited about this," he told a meeting of the American Geophysical Union (AGU). The area is extremely rich in silica–the main ingredient of window glass. The researchers have now concluded that the bright material must have been produced in one of two ways. One: hot-spring deposits produced when water dissolved silica at one location and then carried it to another (i.e. a geyser). Two: acidic steam rising through cracks in rocks stripped them of their mineral components, leaving silica behind. "The important thing is that whether it is one hypothesis or the other, the implications for the former habitability of Mars are pretty much the same," Squyres explained to BBC News. Hot water provides an environment in which microbes can thrive and the precipitation of that silica entombs and preserves them. Squyres added, "You can go to hot springs and you can go to fumaroles and at either place on Earth it is teeming with life - microbial life."[27][28]
Dust storms

Towards the end of June 2007, a series of dust storms began clouding the Martian atmosphere with dust. The storms intensified and by July 20, both Spirit and Opportunity were facing the real possibility of system failure due to lack of power. NASA released a statement to the press which said (in part) "We're rooting for our rovers to survive these storms, but they were never designed for conditions this intense".[29] The key problem caused by the dust storms was a dramatic reduction in solar power caused by there being so much dust in the atmosphere that it was blocking 99 percent of direct sunlight to the rover Opportunity, and slightly more to the rover Spirit.
Normally the solar arrays on the rovers are able to generate up to 700 watt-hours (2,500 kJ) of power per Martian day. After the storms, the amount of power generated was greatly reduced to 128 watt-hours (460 kJ). If the rovers generate less than 150 watt-hours (540 kJ) per day they must start draining their batteries to run survival heaters. If the batteries run dry, key electrical elements are likely to fail due to the intense cold. Both landers were put into the lowest-power setting in order to wait out the storms. In early August the storms began to clear slightly, allowing the rovers to successfully charge their batteries. They were kept in hibernation in order to wait out the remainder of the storm.[30]
On November 10, 2008, a large dust storm further reduced the output of the solar panels to 89 watt-hours (320 kJ) per day—a critically low level.[31] NASA officials were hopeful that Spirit would survive the storm, and that the power level would rise once the storm had passed and the skies started clearing. They attempted to conserve power by shutting down systems for extended periods of time, including the heaters. On November 13, 2008 the rover awoke and communicated with mission control as scheduled.[32]
From November 14, 2008 to November 20, 2008 Spirit averaged 169 watt-hours (610 kJ) per day. The heaters for the thermal emission spectrometer, which uses about 27 watt-hours (97 kJ) per day, have been disabled since November 11, 2008. Tests on the thermal emission spectrometer indicate that it is undamaged, and the heaters for it will be enabled when there is sufficient power.[33] The solar conjunction, where the Sun is between Earth and Mars, started on November 29, 2008 and communication with the rovers was not possible until December 13, 2008.[34]
2009
On February 6, 2009, a beneficial wind blew off some of the dust accumulated on the panels. This has led to an increase in power output to 240 watt hours per day. NASA officials have said that this increase in energy will be used predominantly for driving.[35]
On April 18, 2009 and April 28, 2009 power output of the solar arrays were increased by cleaning events.[36][37] The power output of Spirit's solar arrays has gone from 223 watt hours per day on March 31, 2009 to 372 watt hours per day on April 29, 2009.[37]
Dusty soil with poor cohesion

On May 1, 2009 troubles in driving began. The rover's wheels appeared to be stuck in soft soil with the rover itself resting on a spot of iron(III) sulfate hidden under a veneer of normal-looking soil. For the rover's mobility, iron sulfate is an insidious material with very little cohesion, so that it was very tough for the rover wheels to get a grip on it. JPL team members simulated the situation by means of a rover mock-up and computer models to attempt to get the rover back on track, but it was immobile for several months.[38][39] Indeed, it is particularly difficult to reproduce experimentally on Earth the same soil mechanical conditions as those prevailing on Mars under low gravity and under very weak atmospheric pressure. Tests with a lighter version of a mock-up of Spirit were conducted at JPL in a special sandbox to attempt to simulate the cohesion behavior of poorly consolidated soils under low gravity.[40][41] Preliminary extrication drives began on November 17, 2009.[12]
On December 17, 2009, the right-front wheel suddenly began to operate normally for the first three out of four rotations attempts. It was unknown what effect it would have on freeing the rover if the wheel became fully operational again. The right rear wheel had also stalled on November 28 and has not been working since, leaving the rover with only four fully operational wheels.[42] If the team were unable to gain movement and adjust the tilt of the solar panels, or gain a beneficial wind to clean the panels, the rover would only be able to sustain operations until May 2010.[43]
2010
On January 26, 2010, after several months attempting to free the rover, NASA decided to redefine the mobile robot mission by calling it a stationary research platform. Efforts were directed in preparing a more suitable orientation of the platform in relation to the Sun in an attempt to allow a more efficient recharge of the platform's batteries. This was needed to keep some systems operational during the Martian winter.[44] On March 30, 2010, Spirit skipped a planned communication session and as anticipated from recent power-supply projections, has probably entered a low-power hibernation mode, which could last for months.[45]
As of July 2010[update], sol 2210 (March 22, 2010) was the last communication with the rover.[7]
Astronomy


Spirit pointed its cameras towards the sky and observed a transit of the Sun by Mars' moon Deimos (see Transit of Deimos from Mars). It also took the first photo of Earth from the surface of another planet in early March 2004.
In late 2005, Spirit took advantage of a favorable energy situation to make multiple nighttime observations of both of Mars' moons Phobos and Deimos.[46] These observations included a "lunar" (or rather phobal) eclipse as Spirit watched Phobos disappear into Mars's shadow. Some of Spirit's star gazing was designed to look for a predicted meteor shower caused by Halley's Comet, and although at least four imaged streaks were suspect meteors, they could not be unambiguously differentiated from those caused by cosmic rays.[46]
A transit of Mercury from Mars took place on January 12, 2005 from about 14:45 UTC to 23:05 UTC. Theoretically, this could have been observed by both Spirit and Opportunity; however, camera resolution did not permit seeing Mercury's 6.1" angular diameter. They were able to observe transits of Deimos across the Sun, but at 2' angular diameter, Deimos is about 20 times larger than Mercury's 6.1" angular diameter. Ephemeris data generated by JPL Horizons indicates that Opportunity would have been able to observe the transit from the start until local sunset at about 19:23 UTC Earth time, while Spirit would have been able to observe it from local sunrise at about 19:38 UTC until the end of the transit.[47]
Equipment wear and failures
Although both rovers have passed their original mission time of 90 sols many times over, the extended time on the surface and therefore additional stress on components has resulted in some issues developing.
On sol 779 (March 13, 2006), the right front wheel ceased working[48] after having covered 4.2 mi (7 km) on Mars. Engineers began driving the rover backwards, dragging the dead wheel. Although this has resulted in changes to driving techniques, the dragging effect has become a useful tool. The wheel dragging has partially cleared soil away on the surface as the rover travels and allows for imaging areas that would normally be inaccessible. But in mid-December 2009, to the surprise of the engineers, the right front wheel showed slight movement in a wheel-test on Sol 2113 and clearly rotated with normal resistance on three of four wheel-tests on Sol 2117, but stalled on the fourth.
On sols 2100-2101, the right rear wheel also stalled and has not been working since.
The grinding surface of the Rock Abrasion Tool has worn down, and the device can only be used to brush targets.
All of the other science instruments and engineering cameras continue to function. The Mössbauer spectrometer takes much longer to produce results than it did earlier in the mission because of the decay of its radioactive source.
Honors
To the rover
To commemorate Spirit's great contribution to the exploration of Mars, an asteroid, 37452 Spirit, has been named after it.[49] The name was proposed by Ingrid van Houten-Groeneveld who along with Cornelis Johannes van Houten and Tom Gehrels discovered the asteroid on September 24, 1960.
Ruben H. Fleet Museum and the Liberty Science Center also has an IMAX show called Roving Mars that documents the journey of both Spirit and Opportunity, using both CG and actual imagery.
From the rover
On January 27, 2004 NASA memorialized the crew of Apollo 1 by naming three hills to the north of "Columbia Memorial Station" as the Apollo 1 Hills. On February 2, 2004 the astronauts on Columbia's final mission were further memorialized when NASA named a set of hills to the east of the landing site the Columbia Hills Complex, denoting seven peaks in that area as "Anderson", "Brown", "Chawla", "Clark", "Husband", "McCool", and "Ramon"; NASA has submitted these geographical feature names to the IAU for approval.
See also
- Autonomous robot
- Comparison of embedded computer systems on board the Mars rovers
- Exploration of Mars
- Opportunity rover
- Space exploration
- Unmanned space missions
References
- ↑ 1.0 1.1 "Launch Event Details - When did the Rovers Launch?". http://marsprogram.jpl.nasa.gov/mer/mission/launch_e.html. Retrieved 2009-04-25.
- ↑ "Mars Exploration Rover project, NASA/JPL document NSS ISDC 2001 27/05/2001". pp. 5. http://trs-new.jpl.nasa.gov/dspace/bitstream/2014/12837/1/01-1164.pdf. Retrieved 2009-04-28.
- ↑ Science, Vol. 305, issue 5685, pp 737-900 (6 August 2004). Available here
- ↑ Henry Fountain (May 26, 2009). "Crater was Shaped by Wind and Water, Mars Rover Data Shows". New York Times. http://www.nytimes.com/2009/05/26/science/26obmars.html. Retrieved 2009-05-26.
- ↑ Amos, Jonathan (January 26, 2010). "Nasa accepts Spirit Mars rover 'stuck for good'". BBC News. http://news.bbc.co.uk/1/hi/sci/tech/8481798.stm. Retrieved January 26, 2010. "The US space agency (Nasa) has conceded defeat in its battle to free the Spirit rover from its Martian sand trap. The vehicle became stuck in soft soil back in May last year and all the efforts to extricate it have failed."
- ↑ NASA (January 26, 2010). "Now a Stationary Research Platform, NASA's Mars Rover Spirit Starts a New Chapter in Red Planet Scientific Studies". Press release. http://www.nasa.gov/mission_pages/mer/news/mer20100126.html. Retrieved January 26, 2010. "Washington -- After six years of unprecedented exploration of the Red Planet, NASA's Mars Exploration Rover Spirit no longer will be a fully mobile robot. NASA has designated the once-roving scientific explorer a stationary science platform after efforts during the past several months to free it from a sand trap have been unsuccessful."
- ↑ 7.0 7.1 "sols 2330-2334, July 23-27, 2010 Spirit Awaits "Solar Groovy"". NASA. 2010-08-02. http://marsrovers.jpl.nasa.gov/mission/status_spiritAll.html#sol2230.
- ↑ The scientific objectives of the Mars Exploration Rover
- ↑ Chang, Kenneth (2004-11-07). "Martian Robots, Taking Orders From a Manhattan Walk-Up". The New York Times. http://www.nytimes.com/2004/11/07/science/07mars.html?pagewanted=2. Retrieved 2009-04-09.
- ↑ Squyres, Steve (2005). Roving Mars: Spirit, Opportunity, and the Exploration of the Red Planet. Hyperion Press. pp. 113 – 117. ISBN 9781401301491. http://books.google.com/books?id=GQBRAAAAMAAJ&dq=%22Roving+Mars%22&q=%22World+Trade+Center%22&pgis=1#search.
- ↑ NASA.gov, MER-A 20040121a
- ↑ 12.0 12.1 "Spirit Update Archive". NASA/JPL. http://marsrovers.jpl.nasa.gov/mission/status_spirit.html. Retrieved 2009-05-04.
- ↑ "Spirit Updates". http://marsrovers.nasa.gov/mission/status_spiritAll.html. Retrieved 2010-02-06.
- ↑ Gusev Crater
- ↑ Spaceflightnow.com, Destination Mars, Rover headed toward hilly vista for martian exploration
- ↑ APOD: 2004 January 14 - A Mars Panorama from the Spirit Rover
- ↑ MER color imagery, methods
- ↑ Planetary Blog.
- ↑ Mars Exploration Rover Mission: Press Releases
- ↑ Golombek, et al.. "Surfical geology of the Spirit rover traverse in Gusev Crater: dry and desiccating since the Hesperian" (pdf). pp. 1. http://www.lpi.usra.edu/meetings/earlymars2004/pdf/8055.pdf. Retrieved 2009-01-26. "The rim is ~3 m high and although the crater is shallow (~10 m deep)"
- ↑ David, Leonard (12 March 2005). "Spirit Gets A Dust Devil Once-Over". Space.com. http://www.space.com/missionlaunches/spirit_dust_050312.html. Retrieved December 1, 2006.
- ↑ Close up of the Spirit's West Valley Panorama image
- ↑ Planetary.org Emily Lakdawalla, Teeny little Bigfoot on Mars, January 23, 2008 | 12:41 PST | 20:41 UTC
- ↑ Mars Exploration Rover Mission: All Spirit Updates
- ↑ NASA - NASA Mars Rovers Head for New Sites After Studying Layers
- ↑ "Old rovers learn new tricks". CBC News. January 4, 2007. http://www.cbc.ca/technology/story/2007/01/04/tech-mars.html.
- ↑ Amos, Jonathan (2007-12-11). "Mars robot unearths microbe clue" (web). NASA says its robot rover Spirit has made one of its most significant discoveries on the surface of Mars. (BBC News). http://news.bbc.co.uk/2/hi/science/nature/7137793.stm. Retrieved 2007-12-12.
- ↑ Bertster, Guy (2007-12-10). "Mars Rover Investigates Signs of Steamy Martian Past" (Web). Press Release. Jet Propulsion Laboratory, Pasadena, California. http://marsrovers.jpl.nasa.gov/newsroom/pressreleases/20071210a.html. Retrieved 2007-12-12.
- ↑ Jet Propulsion Laboratory (2007-07-27). "NASA Mars Rovers Braving Severe Dust Storms". Press release. http://www.jpl.nasa.gov/news/news.cfm?release=2007-080. Retrieved 2009-08-21.
- ↑ Jet Propulsion Laboratory (2007-08-07). "Martian Skies Brighten Slightly". Press release. http://marsrovers.jpl.nasa.gov/newsroom/pressreleases/20070807a.html. Retrieved 2009-08-21.
- ↑ Jet Propulsion Laboratory (2008-11-10). "Dust Storm Cuts Energy Supply of NASA Mars Rover Spirit". Press release. http://marsrovers.nasa.gov/newsroom/pressreleases/20081110a.html. Retrieved 2009-08-21.
- ↑ . http://www.newscientist.com/article/dn16050-spirit-rover-recuperating-after-dust-storm.html. Retrieved 2009-08-21.| title=Spirit rover recuperating after dust storm| date=2009-11-14| first=Rachel| last=Courtland| publisher=New Scientist}}
- ↑ Jet Propulsion Laboratory (2008-11-20). "sol 1730-1736, November 14–20, 2008: Serious but Stable". Press release. http://marsrovers.jpl.nasa.gov/mission/status_spiritAll_2008.html#sol1730. Retrieved 2009-08-21.
- ↑ Jet Propulsion Laboratory (2008-11-19). "sol 1709-1715, November 13–19, 2008: Opportunity Prepares for Two Weeks of Independent Study". Press release. http://marsrovers.jpl.nasa.gov/mission/status_opportunityAll_2008.html#sol1709. Retrieved 2009-08-21.
- ↑ "Spirit Gets Energy Boost from Cleaner Solar Panels". NASA/JPL. http://marsrovers.jpl.nasa.gov/newsroom/pressreleases/20090212a.html. Retrieved 2009-02-17.
- ↑ "Another Reset and a Cleaning Event". NASA/JPL. 2009-04-22. http://marsrovers.jpl.nasa.gov/mission/status_spiritAll.html#sol1879. Retrieved 2009-04-25.
- ↑ 37.0 37.1 "Well Behaved, Less Dusty, in Difficult Terrain". NASA/JPL. 2009-04-29. http://marsrovers.jpl.nasa.gov/mission/status_spiritAll.html#sol1886. Retrieved 2009-05-04.
- ↑ "Mars rover may not escape sand trap for weeks". New Scientist. 2009. http://www.newscientist.com/article/dn17120-mars-rover-may-not-escape-sand-trap-for-weeks.html.
- ↑ Chang, Kenneth (2009-05-19). "Mars rover's 5 working wheels are stuck in hidden soft spot". The New York Times. ISSN 0362-4331. http://www.nytimes.com/2009/05/19/science/19rove.html. Retrieved 2009-05-19.
- ↑ "Free Spirit: Updates on the efforts to free the Spirit rover". http://www.jpl.nasa.gov/freespirit/.
- ↑ "A How a Sandbox Could Save Mars Rover". sphere.com. 2009-12-10. http://www.sphere.com/nation/article/to-rescue-rover-on-mars-nasa-practices-in-pasadena-sandbox/19273469. Retrieved 2009-12-11.
- ↑ "Right-Front Wheel Rotations". NASA. December 17, 2009. http://marsrover.nasa.gov/spotlight/20091217a.html.
- ↑ "NASA's Mars Rover has Uncertain Future as Sixth Anniversary Nears". NASA. January 1, 2010. http://marsrover.nasa.gov/spotlight/20091231a.html.
- ↑ "Now A Stationary Research Platform, NASA's Mars Rover Spirit Starts a New Chapter in Red Planet Scientific Studies". NASA. January 26, 2010. http://www.jpl.nasa.gov/freespirit/.
- ↑ "Spirit May Have Begun Months-Long Hibernation". NASA. March 31, 2010. http://marsrovers.jpl.nasa.gov/newsroom/pressreleases/20100331a.html.
- ↑ 46.0 46.1 Jim Bell (Cornell University) et al. Pancam Projects: Spirit Night-time Imaging. Retrieved 2008-10-21
- ↑ Horizons System
- ↑ [1]
- ↑ Mars Exploration Rover Mission: Features
External links
JPL, MSSS, and NASA links
- JPL's Mars Exploration Rover Mission home page
- (obsolete JPL Mars Exploration Rover home page)
- Spirit Mission Profile by NASA's Solar System Exploration
- Planetary Photojournal, NASA JPL's Planetary Photojournal for Spirit
- NASA TV Special Events Schedule for MER News Briefings at JPL
- Mission Status updates from NASA JPL
- Wikisource:NASA MER press briefings
- Finding Spirit: high resolution images of landing site (Mars Global Surveyor - Mars Orbiter Camera)
- JPL's site devoted to the efforts to free Spirit
- MER Analyst's Notebook, Interactive access to mission data and documentation
Other links
- SpaceFlightNow Spaceflightnow.com, Status Page last updated May 2004
- Marsbase.net, a site that tracks time on Mars.
- MAESTRO - public version of rover simulation software (requires download, last update October 25, 2004)
- Cornell's rover site: Athena last update 2006
- Finding Spirit: interactive Mars atlas based on Viking images: you can zoom in/out and pan images, to find your preferred site. "Spirit" approximate position is 14.82°S (= -14.82°N), 184.85°W (= 5.15°E) (not working as of June 4, 2008)
- Google map with Spirit landing site marked
- (AXCH) 2004 Mars Exploration Rovers Highlights - News, status, technical info, history, and more.
- New Scientist on Spirit Dust Devils, 15 March 2005
- New Scientist on Spirit Wheel Status, 3 April 2006
- Unmanned Spaceflight.com discussion on Spirit as of 2008-06-04 last updated 2008-06-04
- Full-page, High-res spherical panorama of Spirit in the Columbia Hills, nasatech.net, Nov 23 to Dec. 5, 2005 (long download, uses Java)
- Full-page, High-res spherical panorama of Spirit at the summit of Husband Hill, nasatech.net, Nov 23 to Dec. 5, 2005 (long download, uses Java)
- Daily Mail article on Spirit, many photos
|
||||||||||||||||||||||
|
||||||||||||||||||||||||||
|
||||||||